Current theories of connectionism have a hard time explaining how the brain deals with novel situations. An alternative approach of fast hierarchical adaptations could solve some of the conundrums.
Our traditional brain theory is designed to explain how we act in familiar situations: How we do things that we know how to do, how we recognize objects that we already are familiar with, and so on. But this theory has a hard time explaining how our brain resolves a novel situation.
Let me consider two problems: an athlete doing a backflip and a maid entering a messy room and having to bring it into order. A backflip is normally more difficult for a human than tidying up a room. However, backflips are easier for robots. Recently, a robotic company has published a video of their humanoid robot doing a back flip. Clap, clap, clap!
But can it do dishes?
Needleless to say, it can’t. Dishes are a much more difficult task for today’s AI technology (which typically operates on the same principles as our traditional connectionist brain theory). We have to remind ourselves of the so-called Moravec’s paradox which states that things easy for humans are difficult for machines, and those easy for machines are difficult for humans. My point here is that Moravec’s paradox translates to the classical connectionist theory of the brain: Things that are easy for real humans are difficult to explain for the connectionist theory, and things that are easy to perform by applying connectionist theory are difficult for a human.
Challenging connectionism with novelty
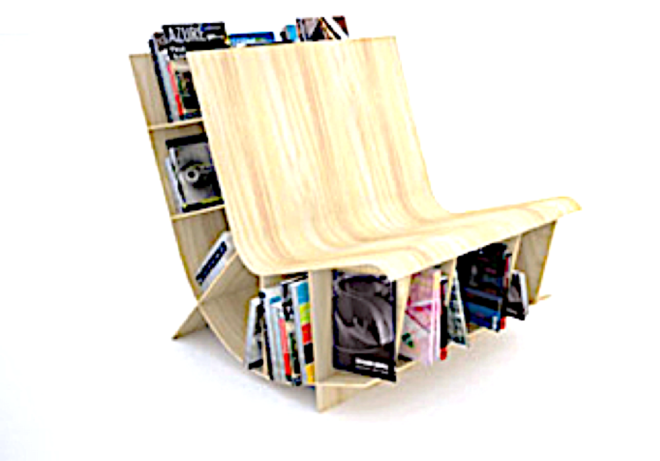
These differences are most easily visible when we challenge ourselves (or challenge connectionism) with novelty. For example, while a connectionist neural network can easily be trained to detect a chair and distinguish it from e.g., a suitcase, such a network cannot resolve the following situation:

Here we have a chair made of suitcases. A connectionist machine, if not trained explicitly on such examples, will not be able to tell that there is a chair in the image above. This is because the chair is made out of suitcases and all the pre-wire connectionist system can see are suitcases. The fact that the shape that these suitcases form allows for using them as a chair, is completely invisible.
The above problem is an example of novelty. We deal with novelty every day. There is always something new to figure out—from the very moment we wake up in the morning. The room in which we slept may have items arranged around in a way never encountered before; yet, we don’t have trouble navigating. The traffic to work may pose novel challenges and yet we always make it with a car, train, bus, bike or whatever. The work itself has always countless novelties no matter what we do for living, and yet we get it done.
Let us get back now to backflips and dishes. A backflip requires considerable physical strength and some skill. However, a backflip is a well-defined simple action, and repetitive backflips present very little novelty. In contrast, tidying up a table and doing dirty dishes is a problem of much more novelty. The dishes come in many different shapes. In addition, these shapes can be arranged in countless different ways. Furthermore, dishes are breakable. This becomes particularly a problem when stacked one on top of another. If a stack of dishes, or sometimes a random pile, is not handled properly there could be a lot of damage done.
This is why we have useless backflip robots today, but do not have robots that act as a maid. The latter would be much more useful, as the market demand for cleaning dishes, tidying rooms and doing laundry is considerably higher than that for backflips.
So, how do our biological brains resolve novel situations?
We have something that we call working memory. Working memory can store a small piece of novel information, say a phone number. Try it out: read this number: 83095 and try writing it down without looking back. Now try this one 9467251736357048. As you can see, the capacity of our working memory for storing information is quite limited.
So, why is then working memory useful in the first place? Working memory is incredibly useful to us, not because of its “memory” part but because of its “working” part. Novel situations get to be worked-out in our working memory. In this case the “work” that is being done includes identifying objects, finding their relations, understanding the situation that they present, recalling from our memory known useful facts about that newly detected situation, guessing what else could be useful, deciding which new information to gather, and so on, and so on. Working memory is where the novelty of the outside universe gets to be worked out.
See related post The Puzzle of Working Memory.
As you can see a lot of things are going on within our working memory. What is actually happening in there is the mind; within working memory the mind does its job. Working memory is a central place where mental operations happen.
Importantly however, working memory does not have a physical location in the brain. This is not a place defined by the anatomy of the brain. Rather, working memory is a place defined by another space—a space defined by the states of the brain’s internal variables. This latter space is much bigger than the one defined by its physical anatomy. While the brain’s anatomy is limited to three dimensions, the state space of brain’s variables has millions if not billions of dimensions. It is somewhere within this multi-million-dimensional space that one can locate working memory. Once we locate it, we can begin observing how the brain deals with novelty.
Finding the right set of variables
So, which variables should we look at? Connectionism has told us that we should focus on the firing rates of neurons, synaptic strengths and the degree of depolarization of cells. But, after decades of following this paradigm, we see that it has not been sufficient to explain much of our behavior. In my previous posts I have detailed why connectionism has failed, and will helplessly keep doing so (for example, here, here and here).
This means that we should maybe look for a different set of variables. I have been arguing that fast adaptations of neurons are the relevant ones—the ones that will bring us to understanding of how the mind works within the brain (for example, here, here and here).
One of the greatest advantages of basing cognition on fast adaptations is the ability of fast adaptations to deal with novelty. This is because fast adaptations are, well, adaptive.
A connectionist network (i.e., one without fast adaptations) is relatively fixed. Although such a network can adjust its connectivity matrix, these adjustments are slow—too slow to change the property of the network within the several 100s of milliseconds normally needed to timely react in a novel situation. This is also how long it normally takes our working memory to come up with its first ideas on how to address a novel situation.
In contrast, a network which in addition employs fast adaptations of neurons, can exhibit a lot more flexibility. The network can simply be changed and adjusted for the needs of a given situation.
 For example, if my task is to clean up a table after a family lunch and to do dishes, I can spend a moment to observe the table. Then I apply my previous table-cleaning knowledge to fast-adjust my neural network to get it into the dishes-mode. Notably, I am not only turning a single on-off switch. Instead, by inspecting the table, I am programming the network to become tuned up for this particular table—for this unique situation. That is, I prepare the network for the types of dishes that I see on the table, for the level of mess that I see in front of me. For example, I may encounter a butter knife stabbed into a loaf of bread on one side and on the other side a pieces of mashed potato dipped into a tea cup all nicely floating within a soup bowl.
For example, if my task is to clean up a table after a family lunch and to do dishes, I can spend a moment to observe the table. Then I apply my previous table-cleaning knowledge to fast-adjust my neural network to get it into the dishes-mode. Notably, I am not only turning a single on-off switch. Instead, by inspecting the table, I am programming the network to become tuned up for this particular table—for this unique situation. That is, I prepare the network for the types of dishes that I see on the table, for the level of mess that I see in front of me. For example, I may encounter a butter knife stabbed into a loaf of bread on one side and on the other side a pieces of mashed potato dipped into a tea cup all nicely floating within a soup bowl.
Give this problem to the backflipping robot from above.
Making use of hierarchical adaptations (in theory)
For a neural network reprogrammable by fast adaptations, this mess does not present a problem for long. By observing the table, all kinds of fast adaptive mechanisms can be activated and adjust the network such that it can interpret this unique table and this particular mess. A new floating-cup circuit can be created in the brain by such adaptations even if such a circuit did not exist ever before. This would be possible reusing and combining a number of adaptations developed earlier in life—some of them having to do with cups, others having to do with floating objects in general, the third one having to do with leftover mashed potato, and so on. The combined result of all of them is that a plan for how to clean up the mess and—as a cognitive scientist would say—is temporarily created within my working memory.
According to the theory of hierarchical adaptations (aka, practopoiesis), this working memory is nothing but a set of adaptations that try to successfully collaborate. Some adaptations adjust my fingers to pick up the cup; in particular, they may prepare my index finger and my thumb. Yet other adaptations, tell my hand that this is a floating object and will not react to touch in the same way firmly standing objects react. Hence, additional adaptations have been applied such that the object is approached differently, with movements needed for floating objects. Moreover, the strength of the grip is adjusted by the expected weight of the cup. Here the perceived amount of leftover mashed potato is critical.
The result is a combination: a completely new neural network (hopefully) capable of picking up a messy tea cup floating in a soup bowl.
I continue in this way throughout the entire task i.e., through the entire mess, reprogramming my network over and over again, as new challenges arise. By doing so, I am coping with all the novelties as they emerge, probably creating some additional novel situation by myself—by my own actions. Still, I manage to get the job done. At the end the table is clean and the dishes are all nicely washed and shiny.
Without fast adaptations this feat would be impossible. It is not feasible to pre-wire a connectionist network for all possible situations that may ever emerge in one person’s life (or robot’s life for that matter). One must be flexible, in real time. Fast adaptations have not yet been investigated sufficiently. Empirical tests are needed to better understanding how our brain uses them. Also, technological applications are needed to improve our AI technology. This general lack of fast adaptations is the reason why we do not have dish-washing robots yet, and why all we get is the useless backflips.
This is a part on the blog series on mind and brain problems by Danko Nikolić. To see the entire series, click here .
Working memory = (99%) the set of active state, general memories