





















¿Qué implica una configuración de interfaz cerebro-máquina (IMC; también llamada interfaz cerebro-computadora o BCI)? Aquí hay una introducción a los paradigmas para el IMC o BCI.
La idea de controlar una computadora o una máquina con el cerebro siempre ha captado la fascinación de la humanidad, produciendo muchas novelas y películas de ciencia ficción sobre este tema, incluso en la década de 1950. Como ya sabemos, controlar un dispositivo externo o una computadora usando su cerebro ya no es cosa de ciencia ficción.
Una demostración temprana de la interfaz cerebro-máquina
Una de las primeras demostraciones de esto fue en 1999 por Chapin y sus colegas, donde se demostró que un grupo de neuronas corticales podía controlar directamente un manipulador robótico [1]. La siguiente figura muestra la configuración experimental en [1], donde las señales neuronales (g y h) registradas con electrodos implantados en la corteza motora primaria (MI) y el tálamo ventrolateral (VL), cuando la rata presiona la palanca (b) para obtener agua se transforman en una ‘señal única’ (i) que predijo el movimiento de la extremidad anterior, que luego se usó para manipular el brazo robótico (c), permitiendo que la rata obtenga agua.
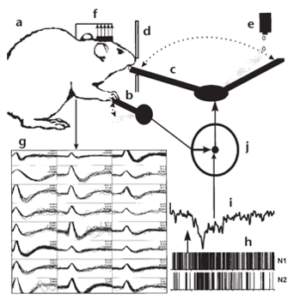
Figura 1: Configuración experimental descrita en [1]
Este simple experimento ya insinuó el considerable potencial de lo que se conoce como interfaz cerebro-máquina (IMC) (también conocida como interfaz cerebro-computadora (BCI)) para ayudar a restaurar las funciones motoras en pacientes gravemente discapacitados / paralizados. Esto ha llevado a una investigación y desarrollo continuos en el campo de los IMC y ha convertido a los IMC en un componente central de la neurociencia de sistemas, con aplicaciones que van desde el control de dispositivos externos como sillas de ruedas, robótica de rehabilitación, así como el potencial para predecir la aparición de convulsiones en la epilepsia o temblores en la enfermedad de Parkinson hasta usuarios sanos en el área de los juegos.
La configuración de la interfaz cerebro-máquina
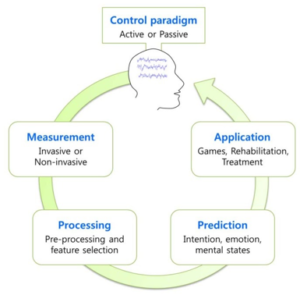
En pocas palabras, un IMC (o BCI) es un dispositivo que traduce la actividad neuronal en comandos para controlar una máquina externa. Como se muestra en la figura (de [2]), un IMC contiene principalmente tres partes:
1) Un dispositivo para registrar la actividad neuronal: esto podría ser invasivo (por ejemplo, ECoG) o no invasivo (por ejemplo, EEG), que se generaría debido, por ejemplo, al usuario imaginando el movimiento de una parte del cuerpo (control activo) o debido a la interacción natural del usuario con el entorno sin ningún esfuerzo adicional por parte del usuario (control pasivo)
2) Un sistema externo que necesita ser controlado. Esto podría ser algo tan simple como un cursor en la pantalla de la computadora o tan complejo como una prótesis.
3) Un algoritmo que puede traducir señales neuronales multicanal en un comando de control y este algoritmo actúa como una especie de puente entre las señales neuronales y el
dispositivo/sistema a controlar. Más específicamente, después de preprocesar la señal neuronal registrada (por ejemplo, usando EEG ), se extraen características de estas señales para representarlas en una forma compacta. Hay varios algoritmos de clasificación disponibles para clasificar estas características (como máquinas de vectores de soporte, análisis discriminante lineal, además de métodos avanzados de aprendizaje automático y aprendizaje profundo, que pueden extraer características adicionales para mejorar la clasificación), antes de traducirse en una señal de comando.
Técnicas de registro para el IMC
¿Qué tipo de métodos de neuroimagen pueden funcionar para aplicaciones de IMC? Desde una perspectiva práctica, si el objetivo es permitir el movimiento en aquellos que tienen parálisis o degeneración de la neurona motora, fundamentalmente tiene que funcionar de una manera que sea portátil y no restringir el movimiento. También necesita operar en las escalas de tiempo de milisegundos de movimiento. Esto descarta técnicas de registro no invasivas como el magnetoencefalograma (MEG), la resonancia magnética funcional (fMRI) y la espectroscopia funcional de infrarrojo cercano (fNIRS). La resonancia magnética funcional y el NIRS miden la actividad neuronal indirectamente, es decir, en función del nivel de oxigenación de la sangre y tienen una resolución temporal deficiente, mientras que el tamaño voluminoso y la restricción de movimiento impuestos por MEG o fMRI los hacen poco prácticos. Esto deja los registros electrofisiológicos.
ver publicación relacionada 7 formas de mirar dentro del cerebro humano vivo
La implantación invasiva de matrices de electrodos que miden la actividad intracortical, como la actividad de una sola unidad, la actividad de varias unidades y LFP, se ha utilizado con bastante éxito en animales (Neuralink, por ejemplo, afirma hacer esto con mayor resolución con su cordón neural y se ha demostrado en cerdos). En humanos, las matrices de electrodos como Micro-ECoG [4], que es una tecnología desarrollada más recientemente, tienen una mejor resolución espacial que las matrices ECoG tradicionales [5-6]. La ECoG epidural, que es menos invasiva que las ECoG, también ha tenido éxito y puede reducir los riesgos asociados con las ECoG altamente invasivas como accidente cerebrovascular, hemorragia, así como proporcionar estabilidad de la señal a largo plazo.
¿Qué pasa con el EEG? ¿Se puede utilizar eficazmente en aplicaciones de IMC? Si bien el EEG ofrece una resolución temporal de milisegundos, que a menudo es útil en aplicaciones BCI, sufre de una resolución espacial deficiente (en el rango de cm) que puede representar un obstáculo para captar señales motoras específicas. Sin embargo, se ha demostrado que funciona razonablemente en una variedad de otros tipos de aplicaciones de IMC que se discutirán en publicaciones posteriores.